
Jalankulkijoiden kääntöporttimoottorien valinta: tietoihin perustuva käyttöiän, nopeuden ja vakauden vertailu
Jalankulkijaa ostettaessakääntöportit, monet asiakkaat keskittyvät aluksi ulkonäköön, materiaaleihin tai tunnistusmenetelmiin (RFID-kortit, kasvojentunnistus, QR-koodit).
Kuitenkin varsinaisessa projektitoiminnassa perustekijä, joka todella määrittää laitteiden vakauden, kestävyyden ja käyttökokemuksen, on syvemmällä tasolla:
Suunnittelun ja sovellusten näkökulmasta tässä artikkelissa yhdistyvät tekniset tiedot ja kenttäkokemus auttaakseen sinua ymmärtämään moottoriratkaisujen eroja ja kuinka valita optimaalinen ratkaisu projektiisi.
1. Miksi moottori määrittää kääntöportin vakauden?
Lukuisten jalankulkuporttiprojektien käyttö- ja kunnossapitotietojen perusteella tilastot osoittavat, että:
a) Noin 60–70 % laitevioista johtuu liikejärjestelmästä.
b) Yli 50 % näistä ongelmista liittyy suoraan moottoriin ja sen käyttökomponentteihin. Tämä osoittaa, että moottorijärjestelmä on ensisijainen tekijä, joka määrittää kääntöportin käyttöiän, vakauden ja yleisen suorituskyvyn.
On myös yleistä kohdata seuraavat skenaariot kenttäsovelluksissa:
c) Alkukäyttö on sujuvaa ja normaalia.
d) 1–2 vuoden käytön jälkeen laitteessa alkaa esiintyä pätkimistä, epänormaalia ääntä ja toistuvia vikoja.
Perimmäistä syytä jäljitettäessä useimmat näistä ongelmista liittyvät suoraan moottorityyppiin ja sen ohjausmenetelmiin.
2. Eri moottoriratkaisujen perustietojen vertailu
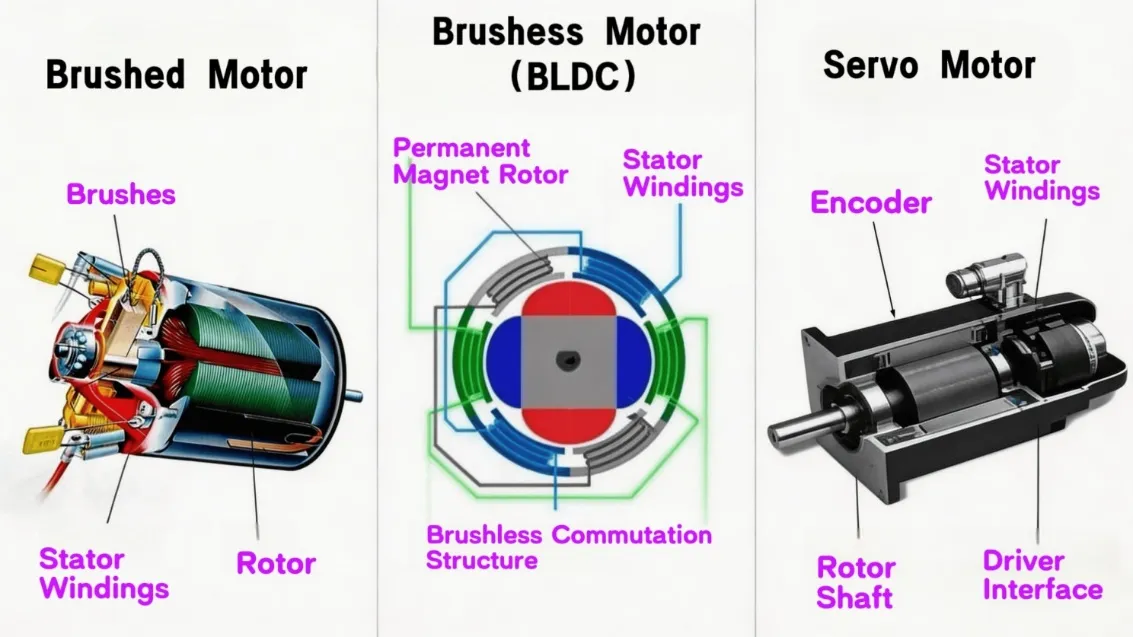
Tällä hetkellä jalankulkijakääntöportitmarkkinoilla hyödynnetään pääasiassa kolmea moottoriratkaisua: harjatut moottorit, harjattomat tasavirtamoottorit (BLDC) ja servomoottorit. Seuraavassa on vertailu tyypillisistä suunnitteluparametreista (alan standardialueet:
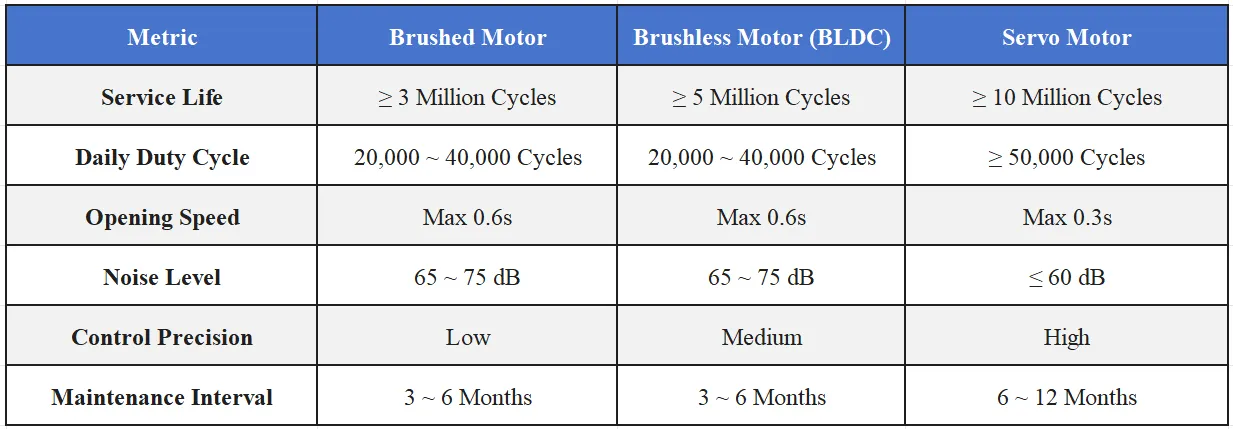
Varsinaisessa projektivalinnassa priorisoimme moottoriratkaisut tyypillisesti suoritustaajuuden ja käyttöiän perusteella sen sijaan, että vertailemme vain laitekustannuksia. Perinteisiin harjattuihin moottoreihin verrattuna harjattomat moottorit (BLDC) voivat pidentää käyttöikää 2–3 kertaa, kun taas servomoottorit tarjoavat lisäedustuksia nopeuteen, tarkkuuteen ja turvallisuuteen.
3. Suorituskyvyn tehokkuus: Käyttäjäkokemuksen määrällisesti mitattava parannus
Monet asiakkaat ilmaisevat toiveensa "pehmeämmistä kääntöporteista", mutta "sileys" on itse asiassa mitattavissa oleva mittari.
a) Avausnopeus (suora vaikutus jonoon)
Harjattu moottori: n. 0,6 s
Harjaton moottori (BLDC): n. 0,6 s
Servomoottori: Nopea kuin 0,3 s
Toimistorakennuksissa ja teollisuuspuistoprojekteissa (joissa päivittäinen liikenne ylittää 20 000+) seuraavat läpikulkunopeudet ovat selvästi havaittavissa:
Harjattu moottori: n. 25-35 henkilöä/minuutti
Harjaton moottori (BLDC): n. 25-35 henkilöä/minuutti
Servomoottori: 35+ henkilöä/minuutti
Eron huomaa heti, onko aulassa jonotusta vai
ruuhkia.
b) Toiminnan tasaisuus ("änkytyksen" poistaminen)
Ydintekijä on kyky kiihtyvyyden ja hidastuvuuden hallintaan:
Harjattu moottori: Ei ohjausta → Kovat käynnistys-/pysäytysjaksot.
Harjaton moottori (BLDC): Perusliikeprofiilit → Yleensä sileä.
Servomoottori: S-käyrän kiihtyvyys/hidastus → Käytännössä iskunvapaa.
Korkean taajuuden kauttakulkuskenaarioissa nämä erot lisääntyvät jatkuvasti, mikä vaikuttaa suoraan yleiseen käyttökokemukseen.
c) Melunhallinta (ympäristövaikutukset)
Kaupalliset toimistoympäristöt vaativat tyypillisesti: Melutaso ≤ 50 dB
Harjattu moottori: 60+ dB (huomattava kohina).
Harjaton moottori (BLDC): Yleisesti standardien mukainen.
Servomoottori: Melkein hiljainen toiminta.
4. Turvallisuusominaisuudet: Moottorin vaihtelun kriittinen vaikutus
a) Puristumaton vastenopeus
b) Harjattu moottori: 100–300 ms
c) Harjaton moottori (BLDC): 50–100 ms
d) Servomoottori: 10–50 ms
e) Mitä lyhyempi vasteaika, sitä korkeampi turvallisuustaso – ero, josta tulee kriittinen tiheän liikenteen skenaarioissa.
Yhteenveto: Kuinka välttää yleiset sudenkuopat valinnassa?
Jos otat pois vain yhden asian, olkoon se tämä: Todellinen ero kääntöporttien välillä ei ole niiden ulkoisessa estetiikassa, vaan niiden moottoreissa ja ohjausjärjestelmissä.
Tarkemmin sanottuna:
a) Matalataajuiset skenaariot: Harjatut moottorit ovat varteenotettava vaihtoehto.
b) Vakioprojektit: Harjattomat (BLDC) moottorit ovat suositeltu valinta.
c) Huippuluokan projektit: Servomoottorit ovat erittäin suositeltavia.
Bottom Line: Väärän moottorin valinta johtaa jatkuviin ylläpitokustannuksiin; oikean moottorin valinta tekee laitteestasi pitkän aikavälin vakaan hyödykkeen. Jos olet parhaillaan projektin valintaprosessissa, suosittelen keskittymistä seuraaviin avainalueisiin: Moottorityyppi (olipa se harjaton tai servo), ohjausmenetelmä (onko siinä kiihdytyksen ja hidastuvuuden hallinta), todistettu seurantatietue (todellisten projektin käyttötietojen saatavuus). Tietyissä projekteissa moottorin ja ohjausjärjestelmän räätälöinti todellisten liikennevaatimusten mukaan on usein paljon tehokkaampaa kuin pelkkä teknisten eritelmien vertailu.



