
Pysäköintijärjestelmät saattavat olla matkalla kohti 3D:tä
Kaupungit ympäri maailmaa kokeilevat älykkäämpiä tapoja hallita pysäköintiä. Jotkut käyttävät pysäköintitilatietoja hintojen säätämiseen dynaamisesti, mikä varmistaa riittävän tilan saatavuuden. toiset ottavat käyttöön tienvarsipysäköintijärjestelmiä, jotka on varustettu maa-antureilla ja integroivat ne laajempiin älykkäiden kaupunkien alustoihin; toiset käyttävät verkkoantureita valvomaan tuhansia yksittäisiä pysäköintipaikkoja. Näillä aloitteilla on selkeä tavoite: vähentää ajoneuvojen ruuhkia, tehostaa tienvarsipysäköintiä ja tehostaa rajallisen kaupunkitilan käyttöä.
Vaikka nämäpysäköinninhallintajärjestelmäton otettu käyttöön useissa maissa maailmanlaajuisesti, ja monet luottavat edelleen hajanaiseen tai epätäydelliseen tietoon. Maa-anturien/silmukkatunnistimen asennus ja laajamittainen ylläpito on kallista, kun taas kamerapohjaiset valvontajärjestelmät voivat olla herkkiä valaistusolosuhteille tai herättää tietosuojaongelmia. Kun kaupungit pyrkivät laajentamaan älykkäitä pysäköintihankkeitaan, haasteena ei ole pelkästään tiedon kerääminen, vaan sen tekeminen luotettavasti, tehokkaasti ja mittakaavassa.
LiDAR-teknologia alkaa saada merkittävää pitoa pysäköinninhallintajärjestelmäsektorilla. LiDAR – lyhenne sanoista Light Detection and Ranging – käyttää laserpulsseja kaapatakseen tarkasti kolmiulotteisen tiedon fyysisestä ympäristöstä, mikä tarjoaa vankan tietoperustan nykyaikaiselle pysäköinnille. LiDAR-pohjaiset järjestelmät antavat kuljettajille mahdollisuuden saada näkemyksiä pysäköintidynamiikasta niin tarkasti kuin perinteisten ratkaisujen kanssa.

Miksi LiDAR sopii hyvin älykkäisiin pysäköinninhallintajärjestelmiin?
LiDAR toimii ytimenään käyttämällä laserpulsseja etäisyyksien mittaamiseen. Nämä mittaukset luovat tiheän, kolmiulotteisen esityksen ympäristöstä, joka tunnetaan nimellä "pistepilve". Toisin kuin kameran kuvat, ympäristön valaistusolosuhteet eivät vaikuta näihin tietoihin. sen sijaan se kuvaa ympäröivän ympäristön geometriaa erittäin tarkasti.
Tämä 3D-tieto tarjoaa lukuisia etuja pysäköintisovelluksiin.
Ensinnäkin LiDAR ylläpitää tasaista suorituskykyä jatkuvasti muuttuvissa ympäristöolosuhteissa. Tekijät, jotka tyypillisesti vaarantavat kamerajärjestelmiä, kuten pimeys, häikäisy tai varjot, vaikuttavat laserpohjaisiin mittauksiin vain vähän. Tämän ansiosta LiDAR sopii erityisen hyvin ulkopysäköintialueille, autotalleihin ja tienvarsiympäristöihin, joissa valaistusolosuhteet vaihtelevat pitkin päivää.
Toiseksi LiDAR kaappaa fyysisiä rakenteita visuaalisen ilmeen sijaan. Ajoneuvot, jalkakäytävät, esteet ja jalankulkijat tunnistetaan kaikki kolmiulotteisiksi esineiksi. Tämän ansiosta algoritmit voivat tunnistaa ja seurata kohteita luotettavasti ilman, että niiden tarvitsee ensin analysoida kaksiulotteisia kuvia, jotka ovat alttiita väärintulkinnoille.
Lopuksi LiDAR-tiedot tukevat yksityisyystietoista valvontaa. Koska tämä tekniikka mittaa etäisyyttä visuaalisten yksityiskohtien sijaan, se ei tallenna tunnistettavia piirteitä, kuten ihmisten kasvoja tai rekisterikilpiä, ellei sitä täydennetä lisäantureilla. Kunnille ja toimijoille, joilla on tiukat tietosuojavaatimukset, tämä voi olla merkittävä etu. Yhdessä nämä ominaisuudet tekevät LiDARista tehokkaan perustan dataohjatuille pysäköintijärjestelmille.

Käyttöasteen valvonta: LiDAR käytännön pysäköinninhallintajärjestelmäsovelluksissa.
Yksi LiDARin suorimmista sovelluksista pysäköintiympäristöissä on ajoneuvojen käyttöasteen seuranta.
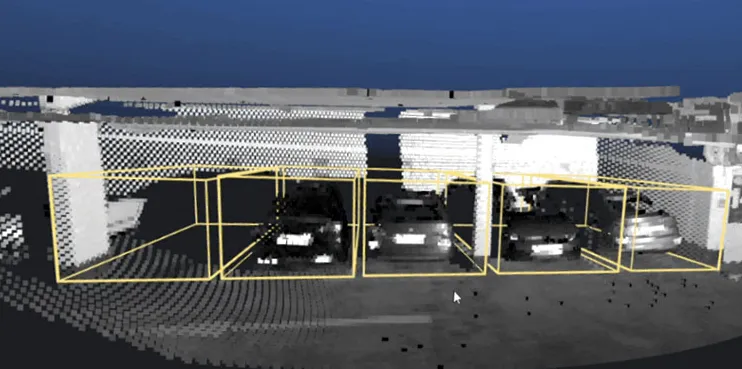
Tyypillisessä asennusskenaariossa LiDAR-anturit asennetaan olemassa olevaan infrastruktuuriin, kuten valopylväisiin tai rakennusten julkisivuihin, joista on näkymät parkkipaikalle tai katualueelle. Anturit skannaavat jatkuvasti ympäristöään muodostaen 3D-tietopistevirran. Ohjelmisto käsittelee näitä tietoja reaaliajassa havaitakseen kohteita, määrittääkseen niiden tarkan sijainnin ja luokitellakseen ne.
Pysäköintipaikkoja voidaan varata järjestelmässä. Kun ajoneuvo saapuu valvottavalle alueelle, anturit havaitsevat sen pistepilven sisällä tunnistamalla kohteen, joka ei ollut aiemmin paikalla. Havaitut pisteet laukaisevat muutoksen parkkipaikan käyttöasteessa. Kun ajoneuvo lähtee, tila merkitään myöhemmin jälleen vapaaksi.
LiDAR-tietojen erittäin suuren tarkkuuden ansiosta jokaisella valvontavyöhykkeellä havaituille kohteille voidaan määrittää kokokynnykset. Tämä varmistaa, että pienet esineet – kuten ostoskärryt, roskat tai ohi kulkevat jalankulkijat – eivät aiheuta vääriä käyttötapahtumia. Pysäköintipaikka merkitään varatuksi vain, kun havaittu kohde ylittää esiasetetut parametrit (esim. ajoneuvon tyypilliset mitat). Tämä konfiguroitava suodatusmekanismi parantaa tunnistustarkkuutta ja varmistaa luotettavat läsnäolotiedot jopa monimutkaisissa ympäristöissä, joille on ominaista usein ajoneuvojen liikkuminen.
Koska LiDAR pystyy kaappaamaan kattavaa paikkatietoa, yksi anturi voi usein valvoa useita pysäköintipaikkoja samanaikaisesti. Strukturoiduissa ympäristöissä – kuten parkkipaikoilla tai reuna-alueilla, joilla on selkeät rajat – yksi asennus voi tehokkaasti kattaa koko alueen.
Vaikka tietäminen, onko pysäköintipaikka varattu, on hyödyllistä, sen "mitä" ymmärtäminen voi olla vielä arvokkaampaa.
LiDAR-pohjainenpysäköinninhallintajärjestelmätosaa luokitella ajoneuvoja niiden koon ja muodon perusteella. Analysoimalla pistepilveen tallennettua 3D-geometriaa algoritmit voivat erottaa luokkien, kuten henkilöautot, pakettiautot, kuorma-autot tai kaksipyöräiset ajoneuvot, välillä.
Tämä tieto avaa oven monenlaisiin käytännön sovelluksiin. Liikenteenharjoittajat voivat esimerkiksi analysoida, ovatko alunperin lyhytaikaisia matkustajien jättöjä varten varatut pysäköintipaikat usein jakeluautojen käytössä. Samoin suuria ajoneuvoja koskevat tiedot voivat auttaa kaupunkeja arvioimaan pysäköintitarpeita lastausvyöhykkeillä tai kaupallisilla pysäköintialueilla.
Ajoneuvojen luokittelu mahdollistaa myös tehokkaamman täytäntöönpanon. Jos määräykset rajoittavat tietyntyyppisiä ajoneuvoja käyttämästä tiettyjä tiloja, automaattiset valvontajärjestelmät voivat merkitä mahdolliset rikkomukset tarkastettavaksi.
Pysäköintitiloissa ajoneuvojen luokitustiedot auttavat kuljettajia ymmärtämään, kuinka erikokoiset ajoneuvot vaikuttavat kapasiteettiin ja liikenteen tehokkuuteen. Kun kaupunkiajoneuvot muuttuvat yhä monipuolisemmiksi – kompakteista sähköajoneuvoista suuriin jakeluautoihin – tästä tiedosta on tulossa entistä kriittisempi laitossuunnittelun kannalta.
Tärkeää on, että nämä analyysit perustuvat kolmiulotteisiin ominaisuuksiin visuaalisen tunnistamisen sijaan. Järjestelmä voi tunnistaa kohteen pakettiauton tai kuorma-auton mitat ja muotoiseksi ilman, että tarvitsee lukea rekisterikilpiä tai tallentaa visuaalisia yksityiskohtia.
Pysäköintiala on vähitellen siirtymässä staattisesta infrastruktuurista dynaamiseen, datalähtöiseen hallintaan. Tämä muutos edellyttää erilaisten kilpailevien tarpeiden – mukaan lukien yksityisautot, rahtikuljetukset, yhteiset liikkumispalvelut ja julkisten tilojen käyttö – tasapainottamista reunakäytävien ja pysäköintialueiden rajallisen kapasiteetin sisällä.
Kun kaupungit harkitsevat edelleen pysäköinnin roolia laajemmassa liikenteen ekosysteemissä, teknologiat, jotka pystyvät toimittamaan tarkkoja, yksityisyyttä kunnioittavia tietoja, ovat yhä tärkeämpiä. LiDAR on nopeasti nousemassa keskeiseksi työkaluksi, jonka avulla käyttäjät voivat tarkastella pysäköintiinfrastruktuuria uuden linssin läpi pysäköinninhallintajärjestelmissään.
Edellinen:OEM/ODM kääntöporteille: Kattava opas



